

干货丨工业机器人工具测量的常用方法
发布日期:2020-12-09
本文主要介绍了工业机器人工具测量的几种方法:
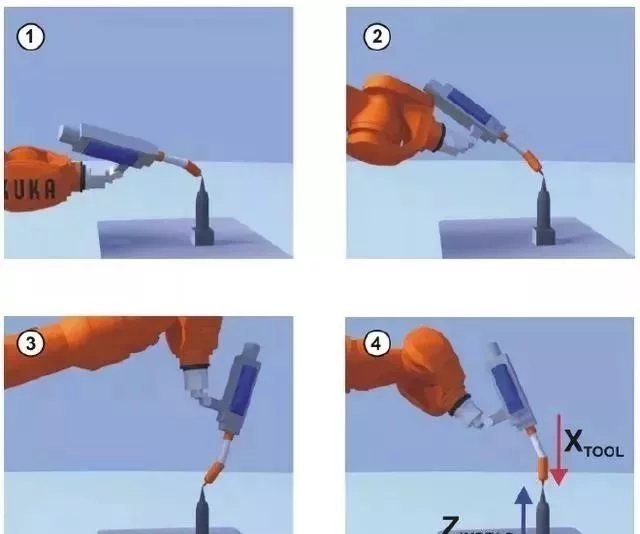
一、CP 测量的 XYZ 4点法
将待测量工具的 TCP 从 4 个不同方向移向一个参照点,参照点可以任意选择。 机器人控制系统从不同的法兰位置值中计算出 TCP,移至参照点的 4 个法兰位置,彼此必须间隔足够远,并且不得位于同一平面内。
XYZ 4 点法的操作步骤:
1、选择菜单序列 投入运行 > 测量 > 工具 > XYZ 4 点。
2、为待测量的工具给定一个号码和一个名称, 用继续键确认。
3、用 TCP 移至任意一个参照点,按下软键测量,对话框“ 是否应用当前位置?继续测量” 用是加以确认。
4、用 TCP 从一个其他方向朝参照点移动,重新按下测量,用是回答对话框提问。
5、把第 4 步重复两次。
6、负载数据输入窗口自动打开,正确输入负载数据,然后按下继续。
7、包含测得的 TCP X、Y、Z 值的窗口自动打开,测量精度可在误差项中读取,数据可通过保存直接保存。
二、TCP 测量的 XYZ参照法
采用 XYZ 参照法时,将对一件新工具与一件已测量过的工具进行比较测量,机器人控制系统比较法兰位置,并对新工具的 TCP 进行计算。
操作步骤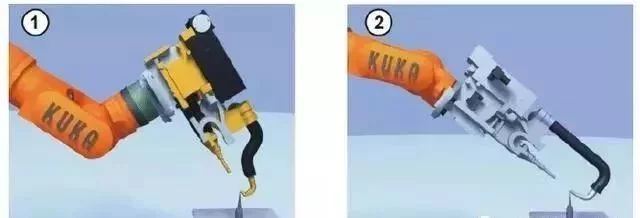
1、前提条件是,在连接法兰上装有一个已测量过的工具,并且 TCP 的数据已知。
2、在主菜单中选择投入运行 > 测量 > 工具 > XYZ 参照。
3、为新工具指定一个编号和一个名称,用继续键确认。
4、 输入已测量工具的 TCP 数据,用继续键确认。
5、 用 TCP 移至任意一个参照点,点击测量, 用继续键确认。
6、将工具撤回,然后拆下, 装上新工具。
7、将新工具的 TCP 移至参照点,点击测量,用继续键确认。
8、按下保存键,数据被保存,窗口自动关闭。
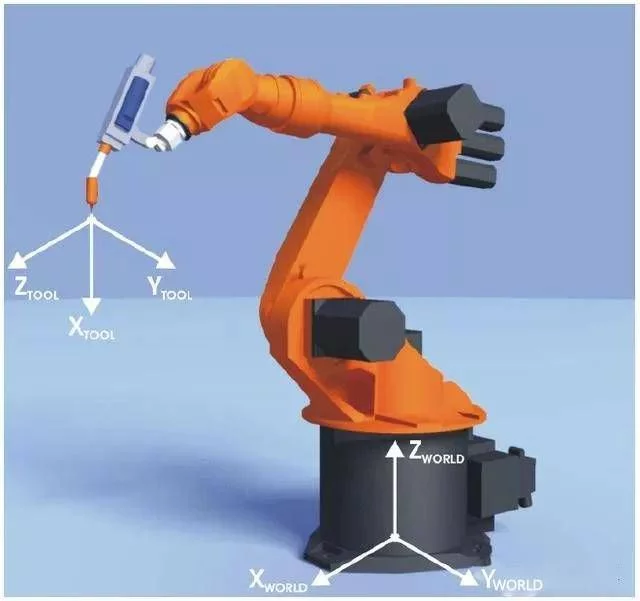
三、ABC 世界坐标系法姿态测量
工具坐标系的轴平行于世界坐标系的轴进行校准, 机器人控制系统从而得知工具坐标系的姿态。
1、此方法有两种方式:
(1)只将工具的作业方向告知机器人控制器,该作业方向默认为 X 轴。 其它轴的方向由系统确定,对于用户来说不是很容易识别。应用范围: 例如:MIG/MAG 焊接,激光切割或水射流切割。
(2)将所有 3 根轴的方向均告知机器人控制系统。应用范围: 例如:焊钳、抓爪或粘胶喷嘴。
2、ABC 世界坐标系法操作步骤
(1) 在主菜单中选择投入运行 > 测量 > 工具 > ABC 世界坐标。
(2) 输入工具的编号,用继续键确认。
(3)在5D/6D 栏中选择一种变型, 用继续键确认。
(4)如果选择了5D:将 +X 工具坐标调整至平行于 -Z 世界坐标的方向。 (+XTOOL = 作业方向)。
(5)如果选择了6D:将 +X 工具坐标调整至平行于 -Z 世界坐标的方向。 (+XTOOL = 作业方向)+Y 工具坐标调整至平行于 +Y 世界坐标的方向。 (+XTOOL = 作业方向)+Z 工具坐标调整至平行于 +X 世界坐标的方向。 (+XTOOL = 作业方向)。
(6)用测量来确认,对信息提示“ 要采用当前位置吗? 测量将继续” 用是来确认。
(7)即打开另一个窗口,在此必须输入负荷数据。
(8)然后用继续和保存结束此过程。
(9)关闭菜单。
四、姿态测量的 ABC 2点法
通过趋近 X 轴上一个点和 XY 平面上一个点的方法,机器人控制系统即可得知工具坐标系的各轴。当轴方向必须特别精确地确定时,将使用此方法。
下述操作步骤适用于工具碰撞方向为默认碰撞方向(= X 向)的情况。 如果碰撞方向改为 Y 向或 Z 向,则操作步骤也必须相应地进行更改。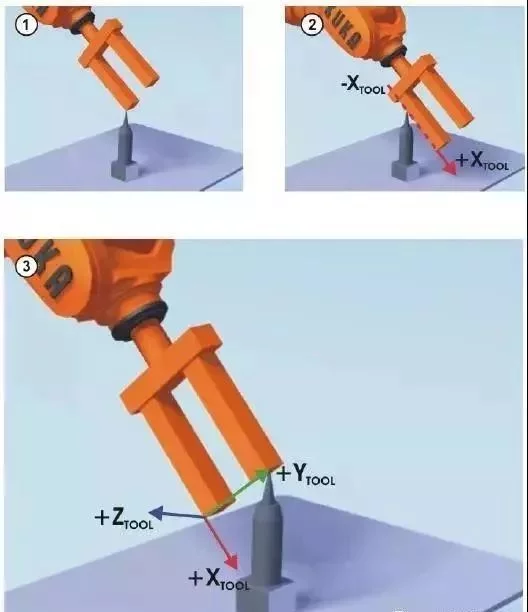
(1)前提条件是,TCP 已通过 XYZ 法测定。
(2)在主菜单中选择投入运行 > 测量 > 工具 > ABC 2 点。
(3)输入已安装工具的编号, 用继续键确认。
(4)用 TCP 移至任意一个参照点, 点击测量, 用继续键确认。
(5)移动工具,使参照点在 X 轴上与一个为负 X 值的点重合(即与作业方向相反), 点击测量, 用继续键确认。
(6)移动工具,使参照点在 XY 平面上与一个在正 Y 向上的点重合, 点击测量,用继续键确认。
(7)按保存,数据被保存,窗口关闭。
来源:智能科学在线
免责声明:本文系网络转载,版权归原作者所有。但因转载众多,无法确认真正原始作者,故仅标明转载来源。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们会在确认后第一时间删除。多谢!
 参观预登记
参观预登记
 参展申请
参展申请